[모두를 위한 딥러닝 시즌2] Lab-10-1 Convolution
[모두를 위한 딥러닝 시즌2] Lab-10-1 Convolution
Convolution
- 이미지 위에서 stride 값 만큼 filter(kernel)을 이동시키면서 겹쳐지는 부분의 각 원소의 값을 곱해서 모두 더한 값을 출력으로 하는 연산
- Stride와 Padding에 따라 출력 크기와 연산 영역이 달라진다
- Stride
- filter가 연산 한 번에 이동하는 크기
- 값이 커질수록 출력(Output) 크기가 작아진다
- padding
- 입력(Input) 주변에 추가로 0(또는 다른 값)을 채워 넣는 작업
- 주로 출력 크기를 조정하거나 경계 데이터 손실을 방지하기 위해 사용
Stride와 Padding 공식
\[\text{Output 크기} = \frac{\text{Input 크기} + 2 \cdot \text{Padding 크기} - \text{Filter 크기}}{\text{Stride}} + 1\]계산 과정
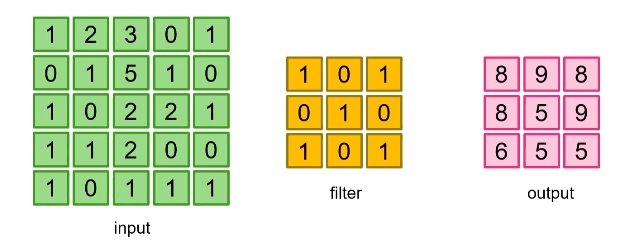
- Input: 5x5 크기의 행렬
- Filter: 3x3 크기의 행렬
- Output: 3x3 크기의 행렬
1. Convolution 연산의 기본 개념
- Filter를 Input 행렬 위에서 슬라이딩하며 곱셈과 합산을 반복
- Filter와 Input이 겹치는 부분의 각 원소를 곱하고, 그 결과를 더하여 Output의 해당 위치에 값을 채워나감
- 이 과정은 Stride = 1(필터가 한 칸씩 이동) 기준으로 진행된다
2. 각 단계별 계산
(1) Output[0, 0]
Filter를 Input의 (0, 0) 위치에 겹쳐 계산
$Sum=(1⋅1)+(2⋅0)+(3⋅1)+(0⋅0)+(1⋅1)+(5⋅0)+(0⋅1)+(1⋅0)+(0⋅1)=8$
Output의 (0, 0)에 8 저장
(2) Output[0, 1]
Filter를 Input의 (0, 1) 위치에 겹쳐 계산
$Sum=(2⋅1)+(3⋅0)+(0⋅1)+(1⋅0)+(5⋅1)+(0⋅0)+(1⋅0)+(0⋅1)+(2⋅1)=9$
Output의 (0, 1)에 9 저장
…
위 과정을 반복
3. 최종 Output
Output 행렬 계산 결과
\[\text{Output} = \begin{bmatrix} 8 & 9 & 8 \\ 8 & 9 & 9 \\ 6 & 6 & 5 \end{bmatrix}\]Pytorch nn.Conv2d
1
torch.nn.Conv2d(in_channels, out_channels, kernel_size, stride=1, padding=0, dilation=1, group=1, bias=True)
- params
- in_channels: input
- out_channels: output
- kernel_size: kernel사이즈 ex ) (2,4) (3,3) (4,3)
- stride: stride 크기
- padding: padding 크기
- dilations(확장률): 필터의 요소 간 간격을 조정하는 데 사용됨
- groups: 입력 및 출력 채널을 분할하여 Convolution 연산을 수행함
- 입력 형태
- type : torch.Tensor
- shape : (N x C x H x W) = (batch_size, channel, height, width)
- 예시 : 입력 채널 1 / 출력 채널 1 / 커널 크기 3x3 구현
1
conv = nn.Conv2d(1,1,3)
Neuron과 Convolution
Perceptron과 Convolution 연산과정
filter와 Perceptron
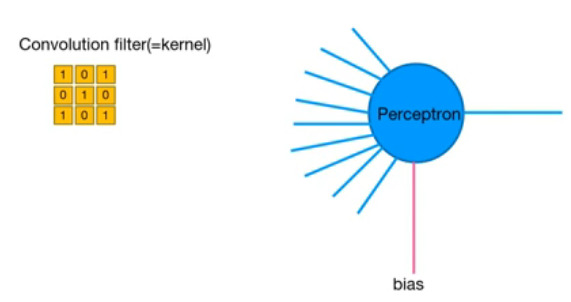
Perceptron의 weight값으로 filter가 들어간다
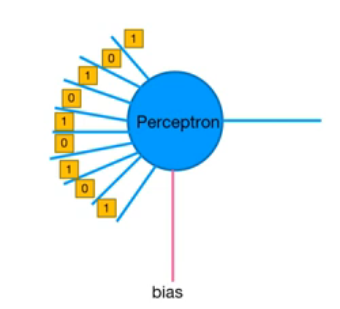
Input data

값과 가중치를 연결하여 연산한다
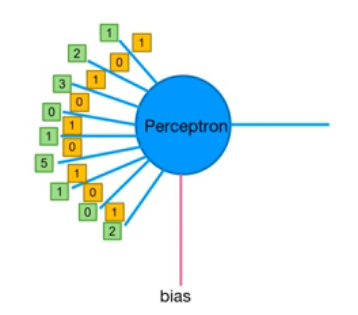
결과 : \(1*1 + 2*0 + 3*1 + 0*0 +1*1 + 5*0 + 1*1 + 0*0 +2*1 + bias = 8 + bias\)
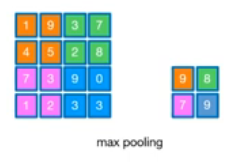
Pooling
- 이미지 사이즈를 줄임
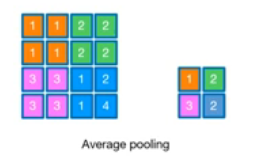
- FC(Fully Connected) 연산을 대체하기 위해 Average Pooling 사용
- Max Pooling : 해당 영역 내의 가장 큰 값을 선택
- Average Pooling : 해당 영역 내의 평균을 계산
MaxPool2d
1
torch.nn.MaxPool2d(kernel_size, stride=None, padding=0, dilation=1, return_indices=False,ceil_mode=False)
- params
- kernel_size: 커널 사이즈
- 다른 값들은 default값이 존재하므로 커널 사이즈만 설정해도 된다
CNN implementation
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
import torch
import torch.nn as nn
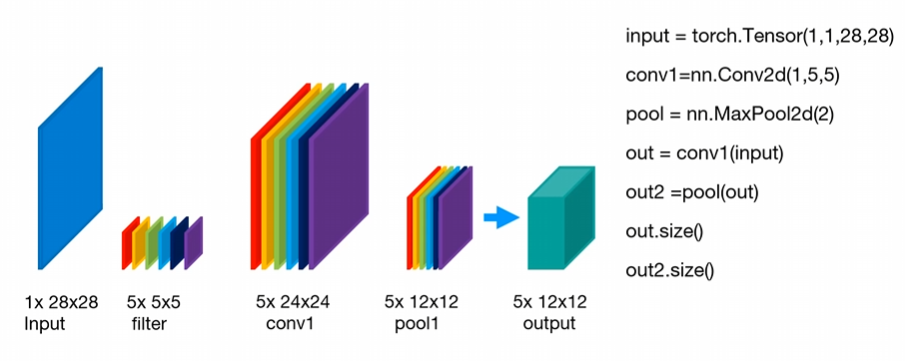
# 입력 텐서를 생성: 배치 크기 1, 채널 1, 높이 28, 너비 28
inputs = torch.Tensor(1, 1, 28, 28)
# Conv2d 레이어 생성: 입력 채널 1, 출력 채널 5, 커널 크기 5
conv1 = nn.Conv2d(1, 5, 5)
# MaxPool2d 레이어 생성: 커널 크기 2 (2x2 영역의 최대값 추출)
pool = nn.MaxPool2d(2)
# Conv2d 레이어를 통과한 결과: 출력 채널 5, 크기 감소 (28x28 -> 24x24)
out = conv1(inputs)
# MaxPool2d 레이어를 통과한 결과: 크기 감소 (24x24 -> 12x12)
out2 = pool(out)
# Conv2d 레이어의 출력 크기 확인
out.size() # torch.Size([1, 5, 24, 24])
# MaxPool2d 레이어의 출력 크기 확인
out2.size() # torch.Size([1, 5, 12, 12])
Conv2d
\[\text{out}(N, C_{\text{out}}) = \text{bias}(C_{\text{out}}) + \sum_{k=0}^{C_{\text{in}}-1} \text{weight}(C_{\text{out}}, k) \star \text{input}(N, k)\]- 필터(Filter)와 입력 이미지(Input)의 겹침 정도를 계산하여 출력(Output)을 생성
Convolution과 Cross-Correlation의 차이
Convolution (컨볼루션)
\[G'[i, j] = H \ast H' = \sum_{u=-\infty}^{\infty} \sum_{v=-\infty}^{\infty} H[i - u, j - v] F[u, v]\]- 필터 $H′$가 뒤집힌 상태에서 입력 $F$와의 연산을 수행
- 흔히 신호 처리와 딥러닝에서 사용하는 핵심 연산으로, 필터의 방향성과 형태를 고려하여 계산
Cross-Correlation (교차상관)
\[T[i, j] = H \otimes K = \sum_{u=-\infty}^{\infty} \sum_{v=-\infty}^{\infty} H[i + u, j + v] K[u, v]\]- 필터 $K$가 뒤집히지 않은 상태에서 입력과 연산을 수행
- 겹침의 정도를 계산하여 출력 값을 생성하며, 딥러닝에서 대부분의 “컨볼루션” 연산은 실제로 Cross-correlation에 해당
Cross-correlation 특징
- Cross-correlation은 입력 요소들의 가중합(Weighted sum)을 기반으로 출력 값을 생성
- 이때 필터(Filter)는 뒤집히지 않은 상태로 입력과 연산
- 딥러닝에서 Conv2d 연산은 Cross-correlation 방식으로 동작하지만 “Convolution”이라는 이름을 사용
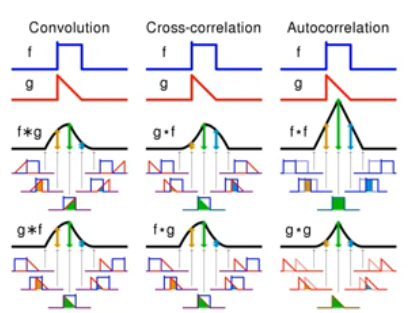
시각적 비교
- Convolution: 필터가 입력 위에서 뒤집혀 작동
- Cross-correlation: 필터가 뒤집히지 않은 상태에서 입력을 스캔
- Autocorrelation: 동일한 신호끼리의 유사도를 계산
This post is licensed under CC BY 4.0 by the author.