[ROS2] Subscriber, Publisher
[ROS2] Subscriber, Publisher
SubScriber 만들기
새로운 노드 파일을 만들어보자
src/my_first_package/my_first_package 경로에 my_subscriber.py를 추가한다
my_subscriber.py에서는 turtlesim의 Pose를 읽을것이다
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
import rclpy as rp
from rclpy.node import Node
from turtlesim.msg import Pose # 구독할 topic의 type
class TurtlesimSubscriber(Node): # Node 상속
def __init__(self):
super().__init__("turtlesim_subscriber") # Node의 init
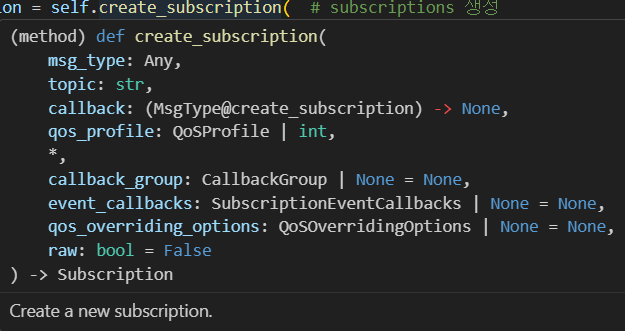
self.subscription = self.create_subscription( # subscriptions 생성
Pose, # type
"/turtle1/pose", # topic
self.callback, # callback
10, # 데이터 queue 크기
)
def callback(self, msg):
print("X: ", msg.x, ", Y: ", msg.y) # 좌표 출력
def main():
rp.init()
turtlesim_subscriber = TurtlesimSubscriber()
rp.spin(turtlesim_subscriber)
turtlesim_subscriber.destroy_node()
rp.shutdown()
if __name__ == "__main__":
main()
create_subscription의 메소드에서 각 arg를 확인할 수 있다
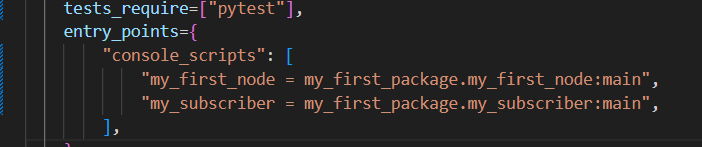
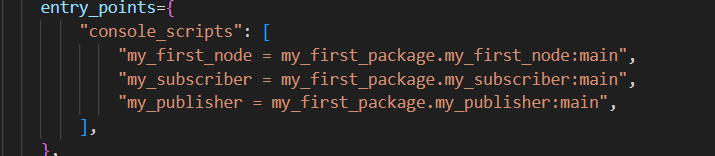
setup.py에 entry point를 추가해준다
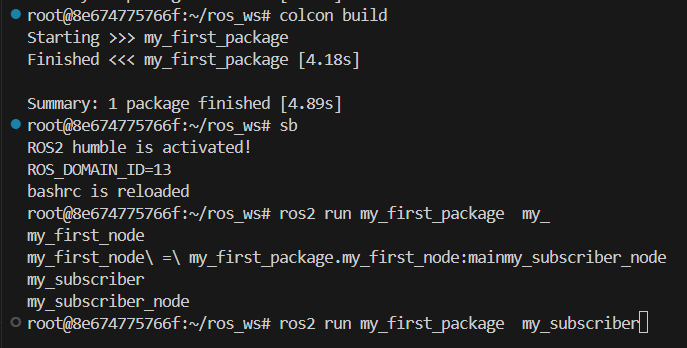
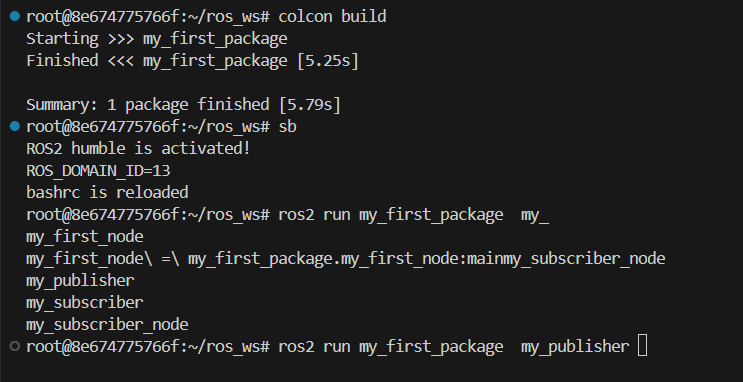
이제 ws에서 build를 해보자
ros2 run my_first_package my 까지 입력 후 tap 2번 입력할 때 노드 목록이 나오면 성공이다
1
2
3
colcon build
sb # local_setup.bash 새로고침
ros2 run my_first_package my_subscriber
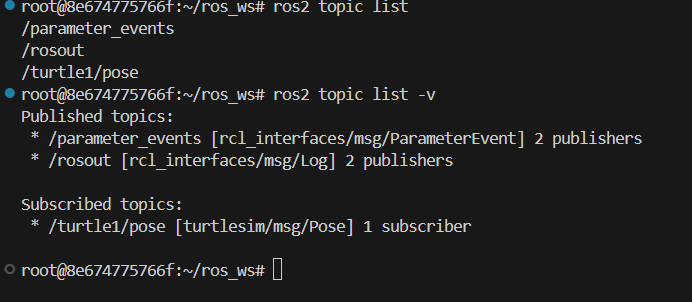
이제 새로운 터미널에서 topic list를 확인해보자
ros2 topic list에서 /turtle1/pose 는 published가 아니라 subscribed 이므로 헷갈릴 수 있다.-v로 자세히 확인해봐야 한다
Publisher 만들기
이제 Publisher를 만들것이다
src/my_first_package/my_first_package에 my_publisher.py를 추가한다
이 코드는 /turtle1/cmd_vel topic을 500ms마다 linear.x=2, angular.z=2로 설정하고 발행한다
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
import rclpy as rp
from rclpy.node import Node
from geometry_msgs.msg import Twist
class TurtlesimPublisher(Node): # Node 상속
def __init__(self):
super().__init__("turtlesim_publisher") # Node의 init
self.publisher = self.create_publisher( # publisher 생성
Twist, # type
"/turtle1/cmd_vel", # topic
10, # 데이터 queue 크기
)
timer_period = 0.5 # 500ms 마다 발행
self.timer = self.create_timer(timer_period, self.timer_callback)
def timer_callback(self):
msg = Twist()
msg.linear.x = 2.0
msg.angular.z = 2.0
self.publisher.publish(msg)
def main(args=None):
rp.init(args=args)
turtlesim_publisher = TurtlesimPublisher()
rp.spin(turtlesim_publisher)
turtlesim_publisher.destroy_node()
rp.shutdown()
if __name__ == "__main__":
main()
이제 subscriber와 동일하게 entry point에 추가하고 build 해보자
1
2
3
colcon build
sb
ros2 run my_first_package my_publisher
publish and subscribe
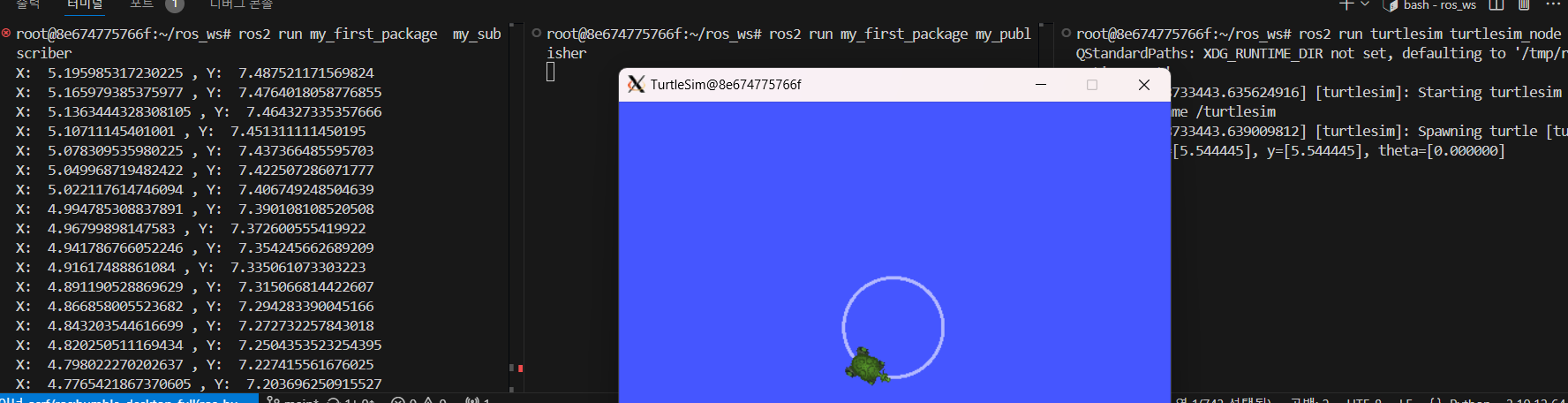
이제 turtlesim, publisher, subscriber를 모두 실행한다
1
2
3
ros2 run turtlesim turtlesim_node
ros2 run my_first_package my_publisher
ros2 run my_first_package my_subscriber
거북이가 빙글빙글 돌면서 위치가 출력된다
참고로 거북이가 움직일때마다 토픽을 구독해서 subscriber 로그가 빠르게 올라온다
rqt로 구조를 확인할 수 있다
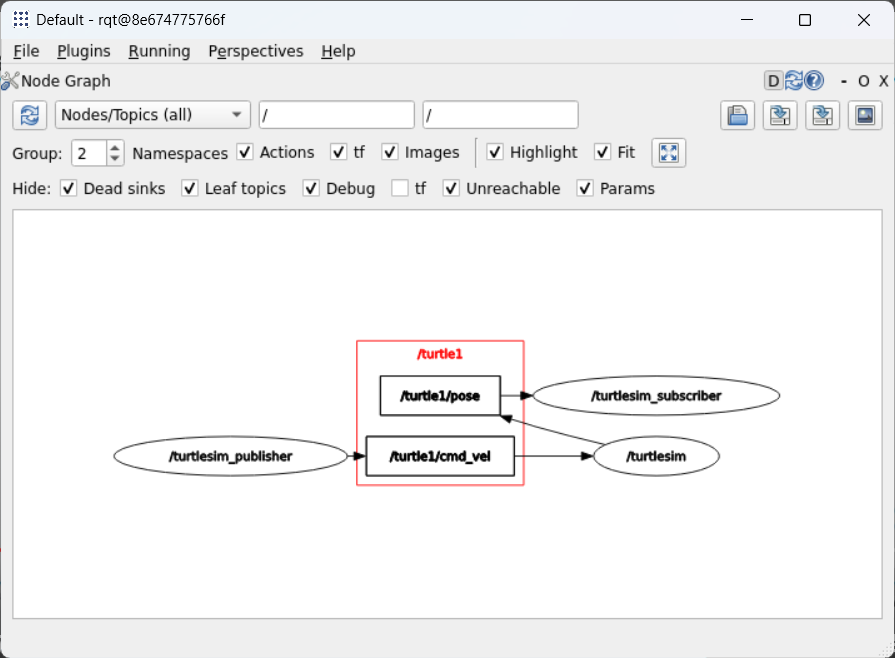
다음 노드 관계는 아래와 같다
- publisher가 cmd_vel 토픽을 발행하고 turtlesim이 구독
- turtlesim이 pose 토픽을 발행하고 subscriber가 구독
This post is licensed under CC BY 4.0 by the author.