[ROS2] package와 Node 만들기
ws의 src 폴더로 이동한다
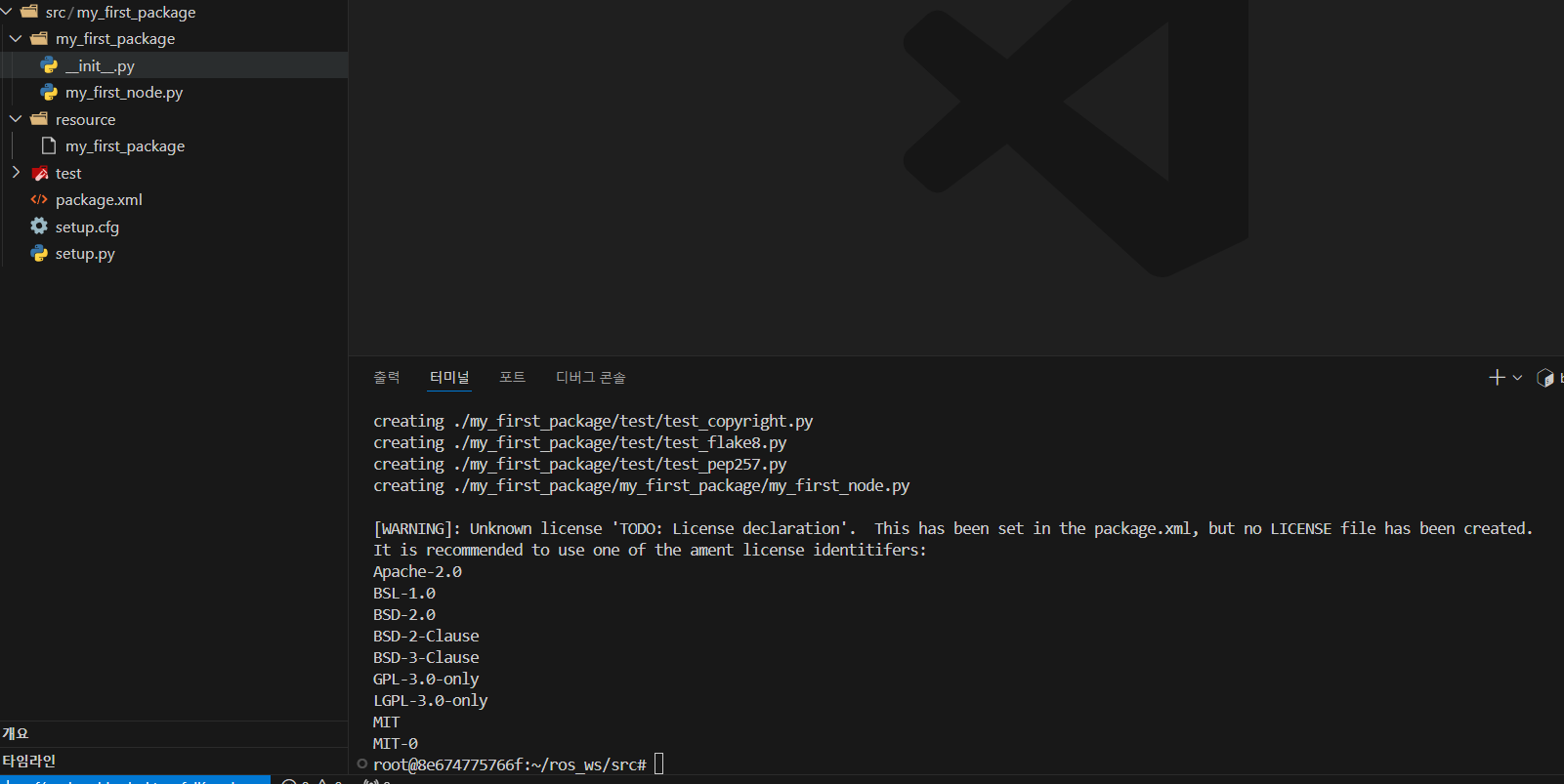
패키지와 노드를 생성해보자
1
2
3
4
5
ros2 pkg create --build-type ament_python --node-name my_first_node my_first_package
# --build-type ament_python : 패키지의 빌드 유형을 ament_python으로 지정하여 Python 기반 ROS2 패키지를 생성
# --node-name my_first_node : 생성할 기본 노드의 이름을 my_first_node로 지정
# my_first_package : 생성할 패키지의 이름을 my_first_package로 설정

build type은 python, cmake 등 원하는 형식으로 지정이 가능하다
node란?
ROS에서 실행 가능한 최소 단위
ros2 run [pkg name][node name] : 노드 실행
ros2 node list : 실행중인 노드 리스트
ros2 node info [node name] : Subscribers, Publishers, Servcie Servers 등 제공하는 기능들
src 폴더 안에 package가 생성되었는지 확인한다
ws로 돌아가 빌드를 실행한다
1
2
cd ..
colcon build
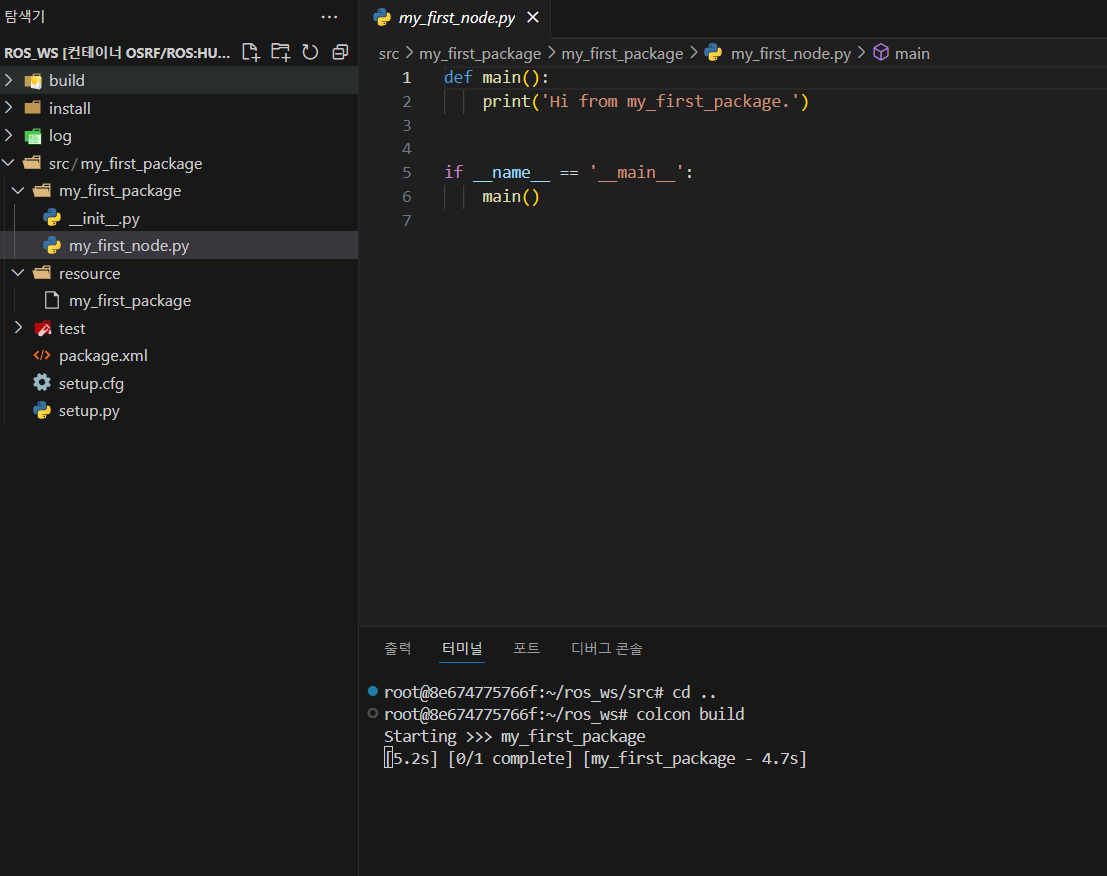
빌드한 node를 실행해보자
1
ros2 run my_first_package my_first_node
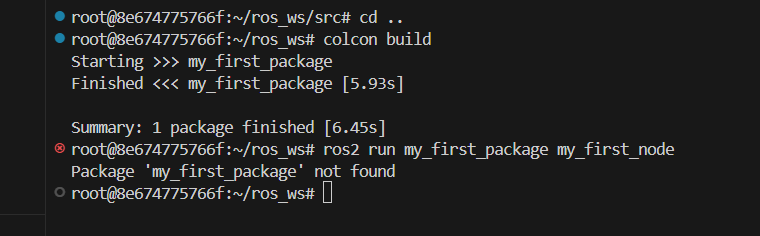
작동이 되지 않는다 !!
워크스페이스의 install 파일을 보면
local_setup.bash라는 파일이 있다
이를 불러와야 인식할 수 있다
1
2
3
ls install/
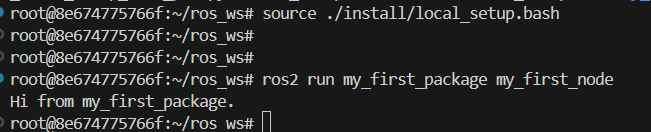
source ./install/local_setup.bash
ros2 run my_first_package my_first_node

워크스페이스 환경설정
local_setup.bash 등록을 터미널을 실행할 때 자동으로 시켜보자
1
echo "source ~/ros_ws/install/local_setup.bash" >> /root/.bashrc

터미널을 다시 실행하고 node를 실행해본다
“Hi from my_first_package.”가 출력된다

This post is licensed under CC BY 4.0 by the author.